Kinect Tracking Precision (KTP) Dataset
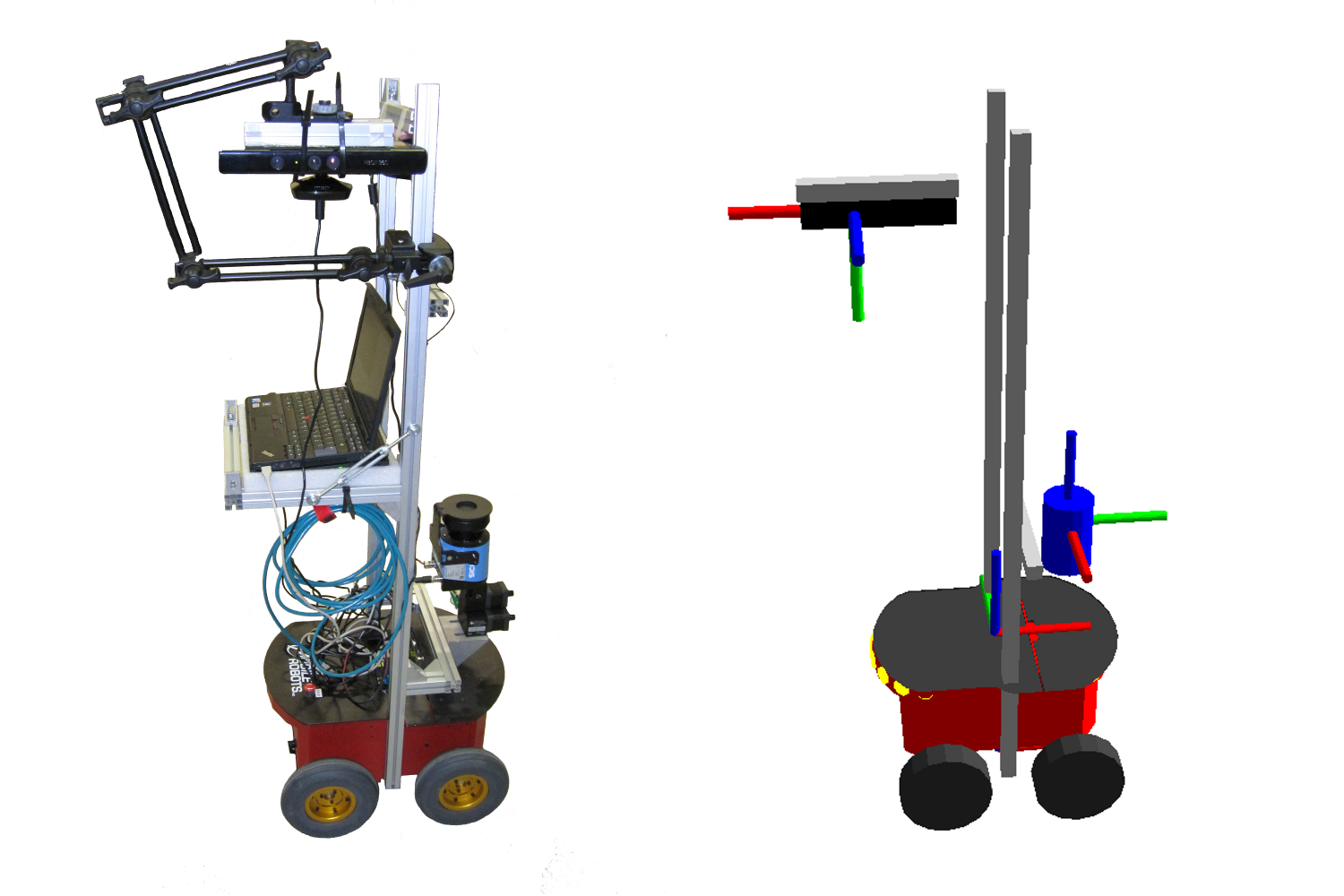
Robotic platform
Here below, the robotic platform used for acquiring the dataset is shown, together with its model in
the URDF standard and its main reference frames.
The metric ground truth is referred to the robot odometry reference frame.
The odometry reports the position of the robot base link with respect to its starting point.
The transformation between Kinect RGB frame and the robot base link is given by:
- translation: [-0.27 1.271 0.002]
- rotation: quaternion [0 0.735 -0.678 0], RPY [-1.651 -0.001 -3.142]
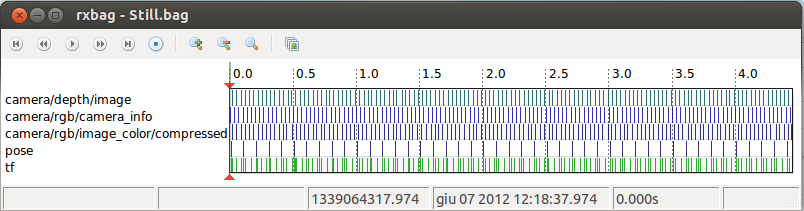
Bag description
- camera/depth/image: Kinect depth image at VGA resolution (publish rate: 30Hz)
- camera/rgb/camera_info: intrinsic and projection matrices for Kinect RGB image (publish rate: 30Hz)
- camera/rgb/image_color/compressed: Kinect RGB image at VGA resolution with JPEG compression (publish rate: 30Hz)
- pose: robot odometry (publish rate: 10Hz)
- tf: transforms among reference frames (publish rate: 100Hz). The complete TF tree can be found here.
Here below, we report an example of our bags as visualized by ROS tool rxbag.

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. Copyright (c) 2013 Matteo Munaro.